RANGKAIAN DRIVER MOTOR STEPPER
1.
Tujuan
[back]
-Mengetahui bentuk rangkaian driver motor stepper
-Memahami prinsip kerja rangkaian driver motor stepper
2.
Alat dan Bahan
[back]
- Switch
- Inverter
- Resistor
- Dioda
- Transistor NPN
- Motor Stepper Unipolar
3.
Dasar Teori
[back]
Komponen yang dibutuhkan:
Sakelar adalah sebuah perangkat yang digunakan untuk memutuskan jaringan listrik, atau untuk menghubungkannya. Jadi saklar pada dasarnya adalah alat penyambung atau pemutus aliran listrik. Selain untuk jaringan listrik arus kuat, saklar berbentuk kecil juga dipakai untuk alat komponen elektronika arus lemah
Gerbang Logika Inverter adalah salah satu Gerbang Logika dengan satu sinyal masukan dan juga satu sinyal keluaran.
Inverter juga disebut sebagai gerbang Komplemen (lawan) dimana sinyal keluaran selalu berlawanan dengan sinyal masukan.
Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkain elektronika.
Dioda adalah komponen elektronika yang terdiri dari dua kutub dan berfungsi menyearahkan arus. Komponen ini terdiri dari penggabungan dua semikonduktor yang masing-masing diberi doping (penambahan material) yang berbeda, dan tambahan material konduktor untuk mengalirkan listrik.
Transistor NPN adalah transistor bipolar yang menggunakan arus listrik kecil dan tegangan positif pada terminal Basis untuk mengendalikan aliran arus dan tegangan yang lebih besar dari Kolektor ke Emitor Cara kerja transistor NPN adalah jika kaki basis transistor diberi tegangan bias maka arus pda kolektor akan mengalir ke kaki emitor.

Stepper motor merupakan salah satu jenis aktuator elektrik yang dapat bergerak secara memutar (rotation). Keunggulan dari stepper motor adalah gerakannya yang dapat dikendalikan dengan mudah. Namun memerlukan sebuah rangkaian pengontrol dengan menggunakan prinsip kerja pulsa. unipolar stepper motor, bekerja dengan menggunakan setengah dari lilitan pada setiap statornya. Sehingga kabel yang disediakan pada unipolar stepper motor biasanya lebih dari empat. Dimana terdapat sebuah common, yang dapat diberikan ke ground atau VCC. Motor stepper merupakan
piranti elektromekanik yang mengkonversi pulsa-pulsa listrik menjadi gerakan
mekanik. Rotor (shaft) motor
stepper berotasi dalam kenaikan langkah diskret ketika pulsa perintah listrik
diterapkan ke motor dalam urutan yang sesuai. Urutan pulsa berhubungan dengan
arah putaran motor. Kecepatan rotasi motor berhubungan dengan frekuensi
masukan. Tabel 1 menjelaskan tentang pola pemrograman mode kerja full-step dari motor stepper.
Tabel 1.
Pola
Pemrograman Full-Step Pada Port
Mikrokontroler
|
PD0
|
PD3
|
PB2
|
PD2
|
|
1
|
1
|
0
|
0
|
|
0
|
1
|
1
|
0
|
|
0
|
0
|
1
|
1
|
|
1
|
0
|
0
|
1
|
Tabel di atas merupakan pola putaran searah
jarum jam (clockwise). Untuk putaran
berlawanan jarum jam (counter clockwise),
maka urutan pola harus dibalik. Motor
stepper dengan tipe unipolar adalah motor stepper yang mempunyai 2 buah lilitan
yang masing-masing lilitan ditengah-tengahnya diberikan sebuah tap seperti tampak pada gambar 3. Gambar 1.
Unipolar Motor
stepper
Motor
ini mempunyai step tiap 30° dan mempunyai dua buah liliatan yang didistribusikan berseberangan 180° di
antara kutub pada stator. Sedangkan pada rotonya menggunakan magnet permanen
yang berbentuk silinder dengan mempunyai 6 buah kutub, 3 kutub selatan dan 3
buah kutub utara. Sehingga dengan konstrusi seperti ini maka jika dibutuhkan ke
presisian dari motor stepper yang lebih tinggi dibutuhkan pula kutub-kutub pada
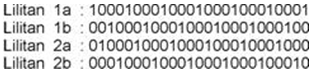
stator dan rotor yang semakin banyak pula. Pada gambar 12.4, motor tersebut
akan bergerak setiap step sebesar 30° dengan 4 bit urutan data (terdapat dua buah lilitan dengan tap, total
lilitan menjadi 4 lilitan).Ketelitian
dari magnet permanen di rotor dapat sampai 1.8° untuk tiap stepnya. Ketika arus mengalir melalui tap tengah pada lilitan
pertama akan menyebabkan kutub pada stator bagian atas menjadi kutub utara
sedangkan kutub stator pada bagian bawah menjadi kutub selatan. Kondisi akan
menyebabkan rotor mendapat gaya tarik menuju kutub-kutub ini. Dan ketika arus
yang melalui lilitan 1 dihentikan dan lilitan 2 diberi arus maka rotor akan
mengerak lagi menuju kutub-kutub ini. Sampai di sini
rotor sudah berputar sampai 30° atau 1 step.

Gambar 2.
Urutan Data Untuk Motor
Stepper Tipe Unipolar (torsi normal)
Gambar 3.
Urutan Data Motor
Stepper Tipe Unipolar (torsi besar)
Untuk
meningkatkan torsi yang tidak terlalu besar maka dapat digunakan urutan
pemberian data. Dimana terdapat dua buah lilitan yang di beri arus pada suatu
waktu. Dengan pemberian urutan data seperti ini akan menghasilkan torsi yang
lebih besar dan tentunya membutuhkan daya yang lebih besar. Dengan
urutan data baik pada Gambar 3 di atas akan menyebabkan motor berputar sebanyak
24 step atau 2 putaran.
4.
Percobaan
[back]
1. Susun rangkaian seperti pada
gambar
2.Setelah itu tekan Run
Prinsip Kerja:
Untuk mendapatkan full step, maka input yang dimasukkan harus sesuai dengan tabel berikut
Tabel 1. Pola Pemrograman Full-Step Pada Port Mikrokontroler
|
|
Bit 1
|
Bit 2
|
Bit 3
|
Bit 4
|
|
Kondisi
1
|
1
|
1
|
0
|
0
|
|
Kondisi
2
|
0
|
1
|
1
|
0
|
|
Kondisi
3
|
0
|
0
|
1
|
1
|
|
Kondisi
4
|
1
|
0
|
0
|
1
|
Saat Kondisi 1, pada bit 1 dan 2 berlogika 1, input akan diteruskan melewati inverter sehingga dihasilkan output berlogika 0. Logika 0 menandakan tidak ada arus yang mengalir sehingga arus nya tidak cukup untuk membangkitkan base transistor. Maka transistor dalam keadaan off dan rangkaian yang terhubung ke pada motor stepper menjadi open circuit. Sedangkan untuk bit 3 dan 4 yang berlogika 0, akan diteruskan menuju inverter sehingga dihasilkan logika 1. Logika 1 menandakan adanya arus yang mengalir menuju resistor. Setelah melewati resistor akan menuju ke basis transistor, karena ada arus yang cukup maka arus mengaktifkan basis transistor sehingga rangkaian yang terhubung ke motor stepper dalam keadaan closed circuit. Basis transistor yang sudah aktif menyebabkan arus dari collector dapat mengalir menuju emittor, namun karena adanya dioda dalam keadaan reverse, arus tidak dapat mengalir. Sehingga dapat disimpulkan tidak ada arus yang mengalir ke motor stepper, atau apabila dilogika kan dalam logika 0. Karena motor stepper dihubungkan dengan VCC maka untuk aktif, input yang lain perlu di ground kan. Sehingga untuk pin input motor stepper yang terhubung ke bit 3 dan bit 4 dalam keadaan aktif. Pada saat ini motor dalam keadaan vertikal. Hal ini terus berlanjut sesuai dengan urutan kondisi pada tabel. Setiap pindah kondisi, motor akan berputar 180° ke arah kiri.
6.
Link Download
[back]
Materi -
Download
1. Diketahui motor stepper dengan logika 1 pada bit 1 dan 2, dan logika 0 pada bit 3 dan 4. Apabila input bit diubah menjadi kondisi berikut, bit 1 bernilai 0, bit 2 bernilai 1, bit 3 bernilai 1, dan bit 4 bernilai 0. Maka stepper motor akan berada dalam posisi...
a.

bergerak ke kiri
b.

bergerak ke kanan
c.

bergerak ke kiri
d.
bergerak ke kanan
e.

bergerak ke kiri
bergerak ke kiri
Jawaban : a.
Pembahasan:
Apabila bit 2 dan 3 berlogika 1, input akan diteruskan melewati inverter sehingga dihasilkan output berlogika 0. Logika 0 menandakan tidak ada arus yang mengalir sehingga arus nya tidak cukup untuk membangkitkan base transistor. Maka transistor dalam keadaan off dan rangkaian yang terhubung ke pada motor stepper menjadi open circuit. Sedangkan untuk bit 1 dan 4 yang berlogika 0, akan diteruskan menuju inverter sehingga dihasilkan logika 1. Logika 1 menandakan adanya arus yang mengalir menuju resistor. Setelah melewati resistor akan menuju ke basis transistor, karena ada arus yang cukup maka arus mengaktifkan basis transistor sehingga rangkaian yang terhubung ke motor stepper dalam keadaan closed circuit. Basis transistor yang sudah aktif menyebabkan arus dari collector dapat mengalir menuju emittor, namun karena adanya dioda dalam keadaan reverse, arus tidak dapat mengalir. Sehingga dapat disimpulkan tidak ada arus yang mengalir ke motor stepper, atau apabila dilogika kan dalam logika 0. Karena motor stepper dihubungkan dengan VCC maka untuk aktif, input yang lain perlu di ground kan. Sehingga untuk pin input motor stepper yang terhubung ke bit 1 dan bit 4 dalam keadaan aktif. Pada saat ini motor dalam keadaan horizontal dan motor berputar 180° ke arah kiri.
2. Apabila bit 1 dan 2 berlogika 0 kemudian bit 3 dan 4 berlogika 1, maka stepper motor akan berada pada posisi...
a.
bergerak ke kiri
b.
bergerak ke kanan
c.
bergerak ke kiri
d.
bergerak ke kanan
e.
bergerak ke kiri
Jawaban: e.
Pembahasan:
Apabila bit 3 dan 4 berlogika 1, input akan diteruskan melewati inverter sehingga dihasilkan output berlogika 0. Logika 0 menandakan tidak ada arus yang mengalir sehingga arus nya tidak cukup untuk membangkitkan base transistor. Maka transistor dalam keadaan off dan rangkaian yang terhubung ke pada motor stepper menjadi open circuit. Sedangkan untuk bit 1 dan 2 yang berlogika 0, akan diteruskan menuju inverter sehingga dihasilkan logika 1. Logika 1 menandakan adanya arus yang mengalir menuju resistor. Setelah melewati resistor akan menuju ke basis transistor, karena ada arus yang cukup maka arus mengaktifkan basis transistor sehingga rangkaian yang terhubung ke motor stepper dalam keadaan closed circuit. Basis transistor yang sudah aktif menyebabkan arus dari collector dapat mengalir menuju emittor, namun karena adanya dioda dalam keadaan reverse, arus tidak dapat mengalir. Sehingga dapat disimpulkan tidak ada arus yang mengalir ke motor stepper, atau apabila dilogika kan dalam logika 0. Karena motor stepper dihubungkan dengan VCC maka untuk aktif, input yang lain perlu di ground kan. Sehingga untuk pin input motor stepper yang terhubung ke bit 1 dan bit 2 dalam keadaan aktif. Pada saat ini motor dalam keadaan vertikal kembali dan motor berputar 180° ke arah kiri.










 bergerak ke kiri
bergerak ke kiri bergerak ke kanan
bergerak ke kanan bergerak ke kiri
bergerak ke kiri bergerak ke kiri
bergerak ke kiri
No comments:
Post a Comment